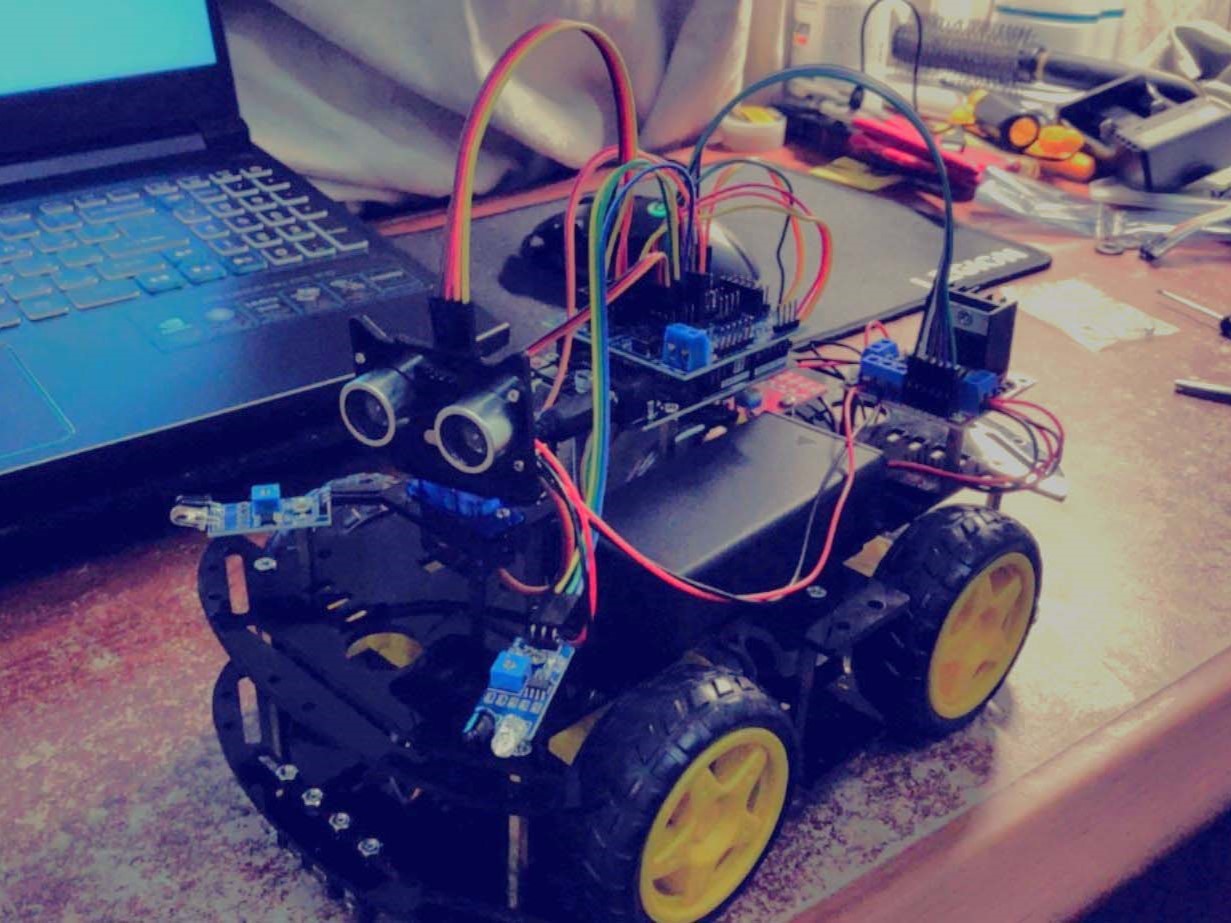

Arduino Uno & Expansion Boards
Serve as the brains; handling processing and control of all other components

TT Motors & Wheels (x4)
Provide essential mobility; high torque and 4 indicidual motors allow for larger range of motion and speed
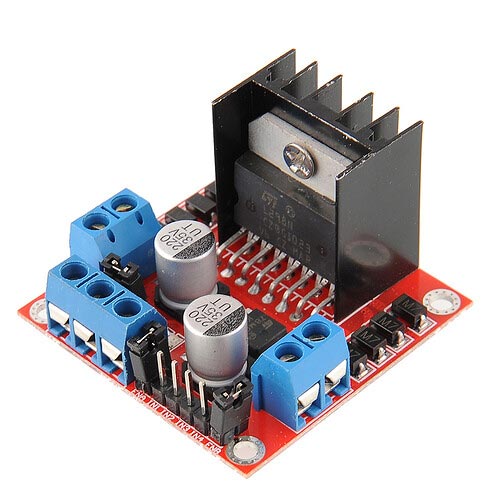
L298 Stepper Motor Modules
Provide precise control of the motor's speed and direction

HC-SR04 Ultrasonic Sensor
Used for detecting obstacles and navigating environment

SG90 180° Servo
Mounted with the Ultrasonic Sensor for range scanning. Rotates to detect obstacles from multiple directions.
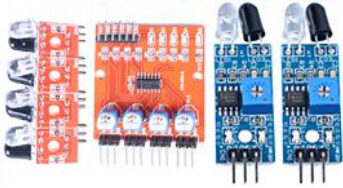
Infrared Sensor, Detection, & 4-Way Tracking Module
Used for object/line-following; adaptable to environment, with adjustable detection distance and angle

18650 Battery Box
Holds two 18650 rechargeable batteries responsible to power the robot (seperate/larger battery box will likely be used to power the vacuum)