
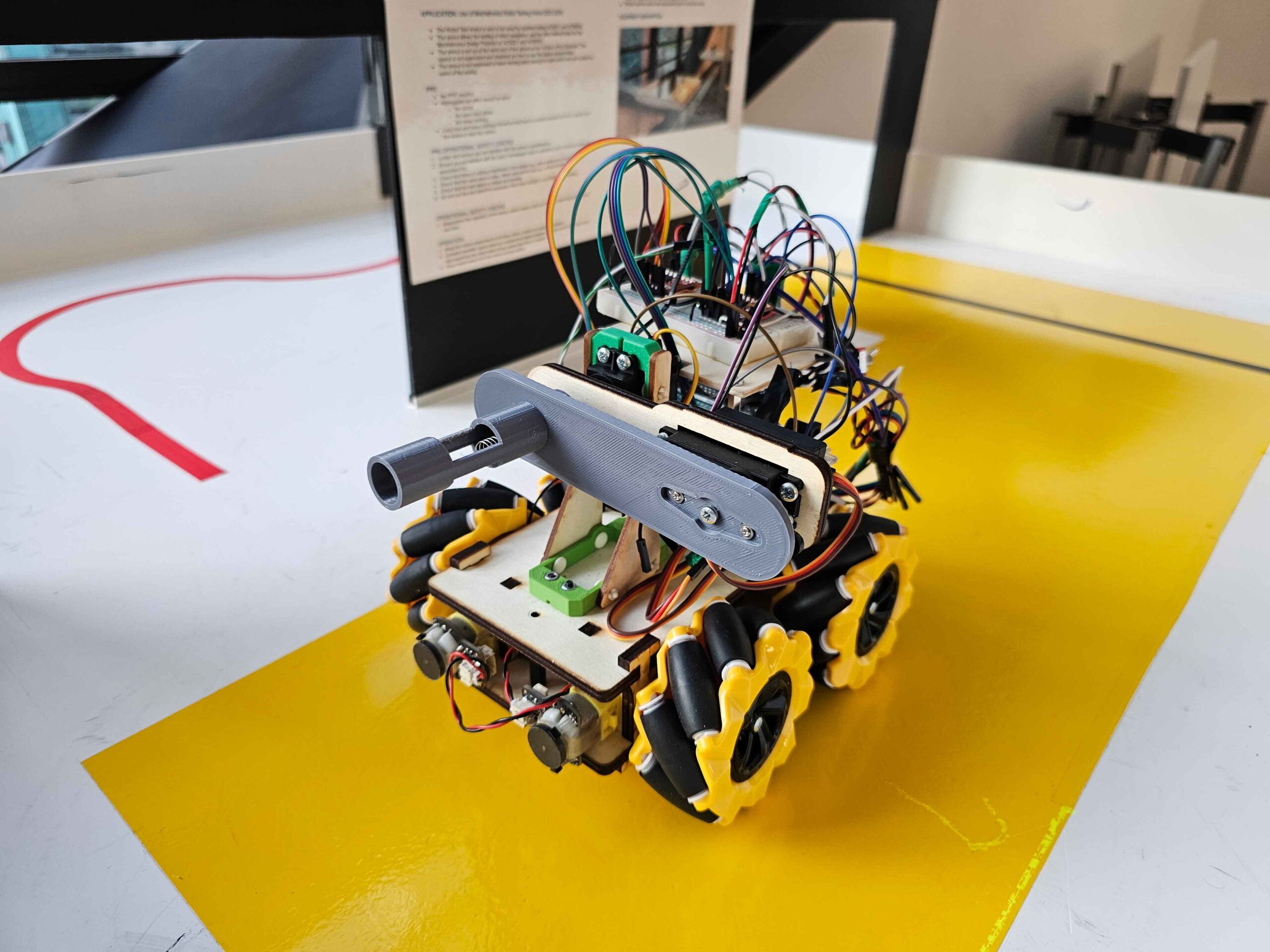
The Robot Challenge
Autonomous Mecanum-Wheeled Robot for Precision Navigation and Drawing
4 Member Team
Mechatronics Module Project
The University of Sheffield
📅 October 2023 – December 2023
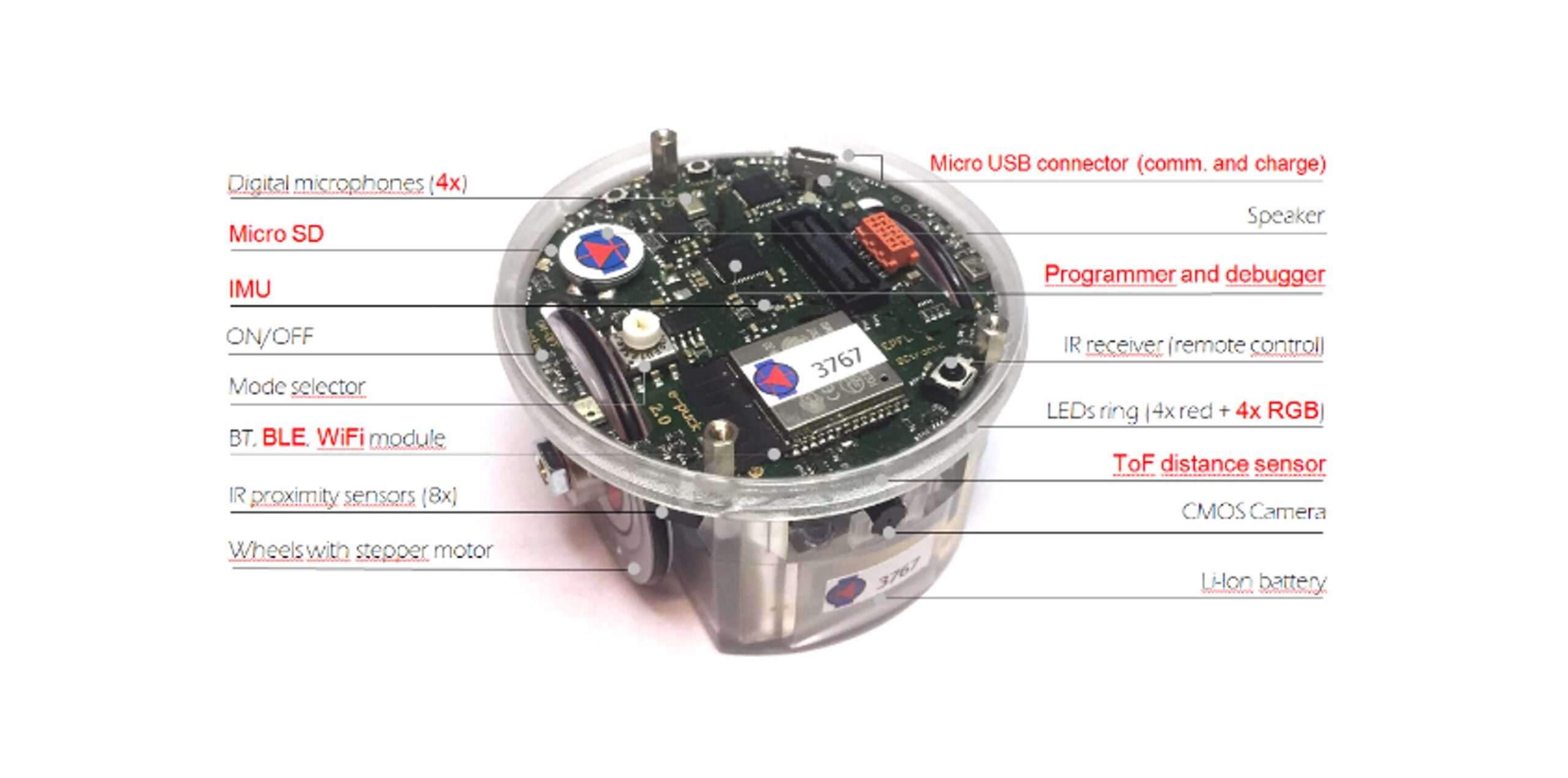
e-puck2 Robot Obstacle Avoidance and Tracking
Adaptive Control Strategies for Obstacle Avoidance and Following
2 Member Team
Robotics Module Project
The University of Sheffield
📅 February 2023 – April 2023

TurtleBot3 Arena Navigation and Exploration
Autonomously Explore & Map Obstacle-Filled Arena
Mobile Robotics & Autonomous Systems
4 Member Team
The University of Sheffield
📅 April 2024 – May 2024
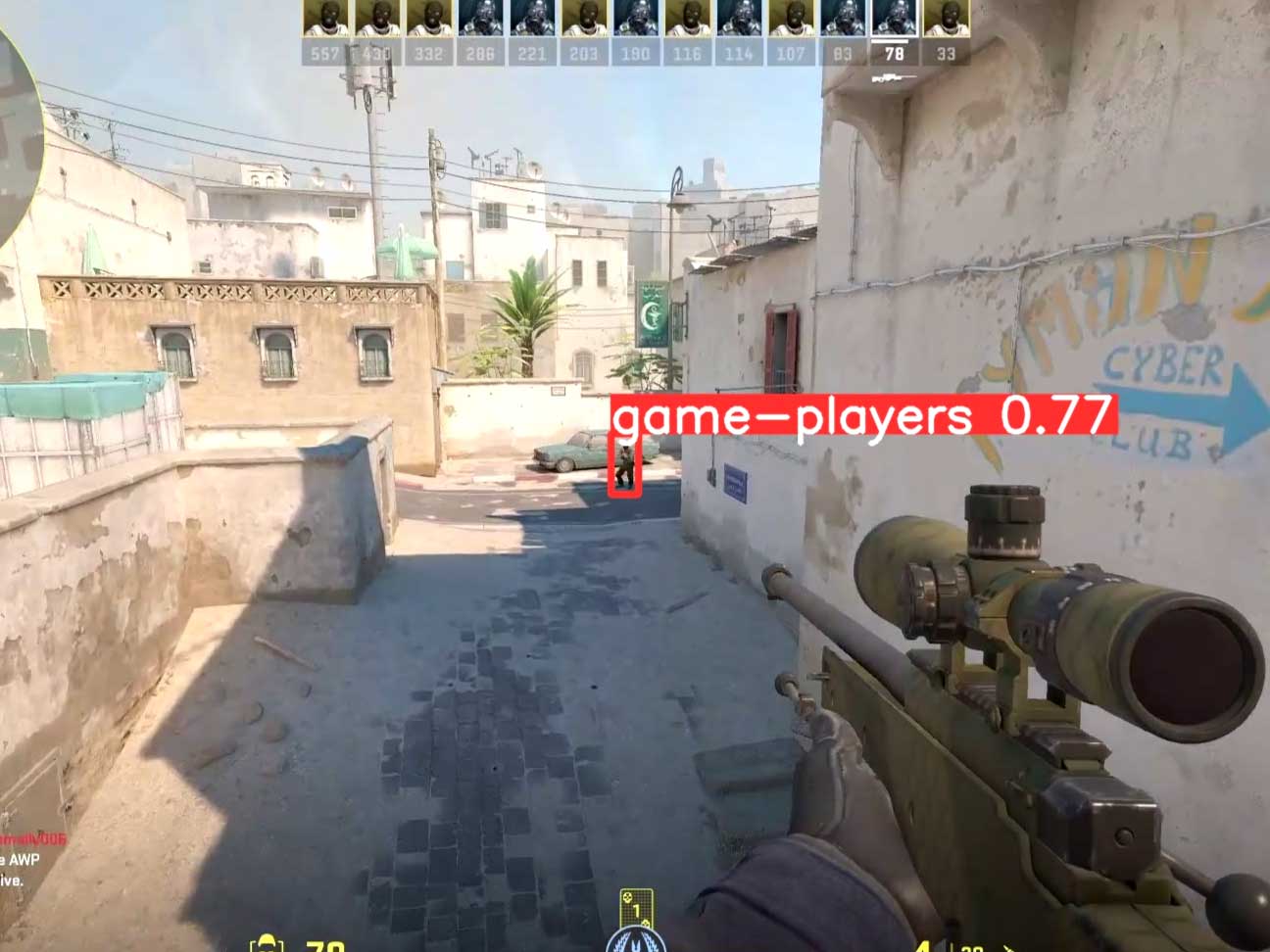
YOLOv8 CS2 Player Detection
Player Detection and Recognition for CS2
YOLOv8 & RoboFlow
Independent Project
📅 February 2024
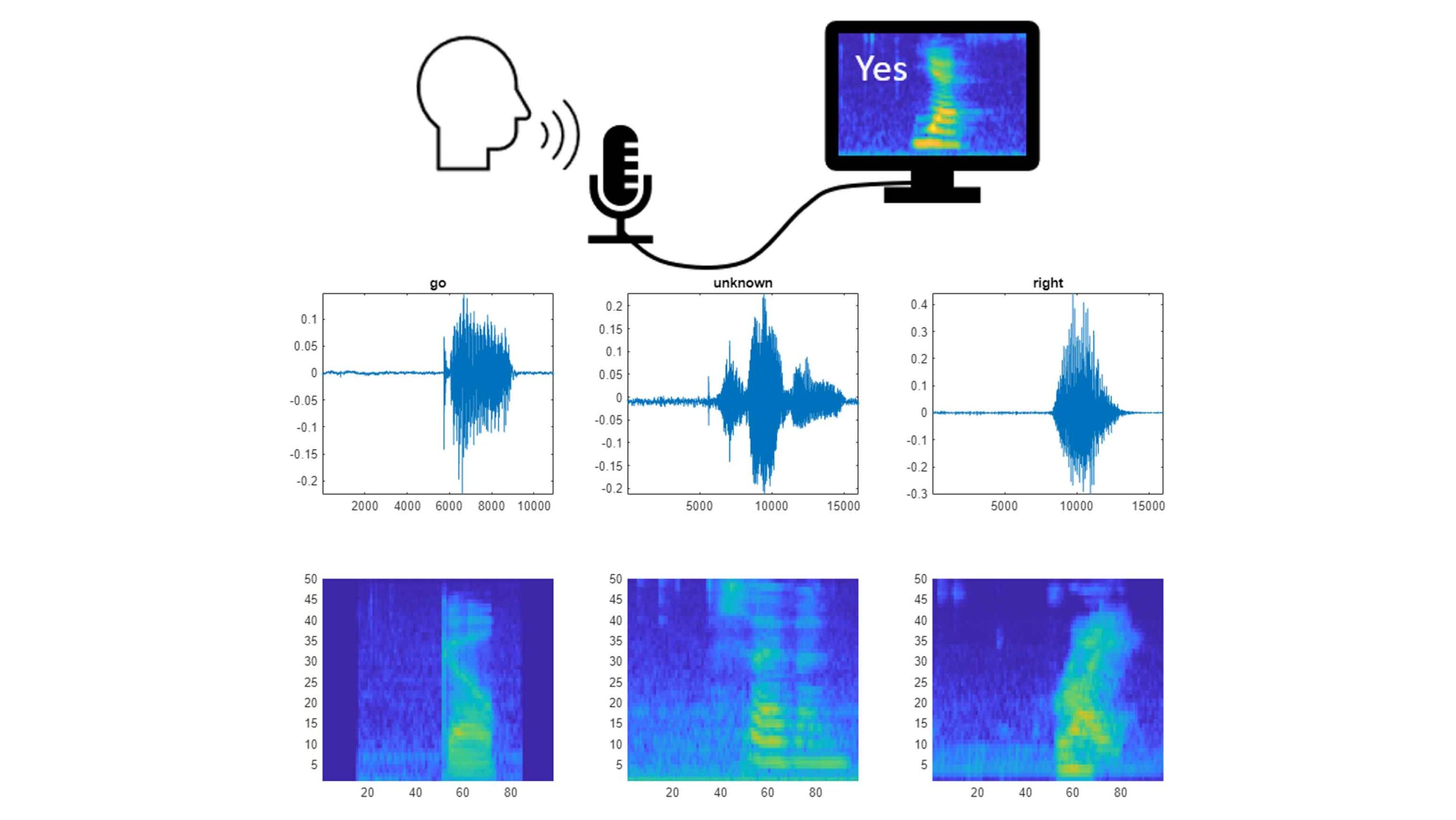
Automated Speech Recognition (ASR) using Deep Learning
Designing, Implementing, & Evaluating ASR Model using Deep Learning Methods
Deep Learning Module Project
The University of Sheffield
📅 March 2024
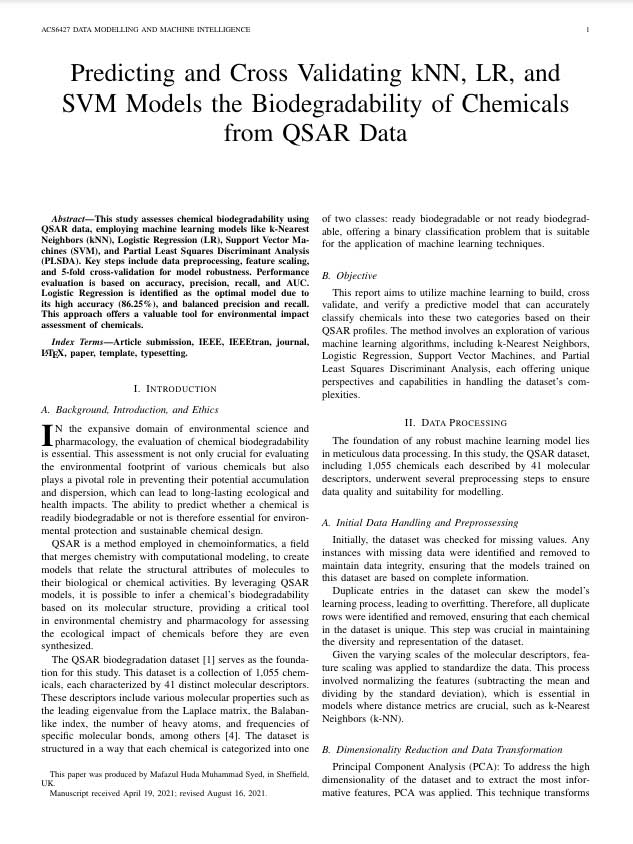
Predicting Biodegradibility of Chemicals from Quantitative-Structure-Activity Relations (QSAR) Data
Predicting and Cross Validating kNN, LR, SVM, & PLSDA Models
Data Modelling and Machine Intelligence
The University of Sheffield
📅 November 2023 – December 2023
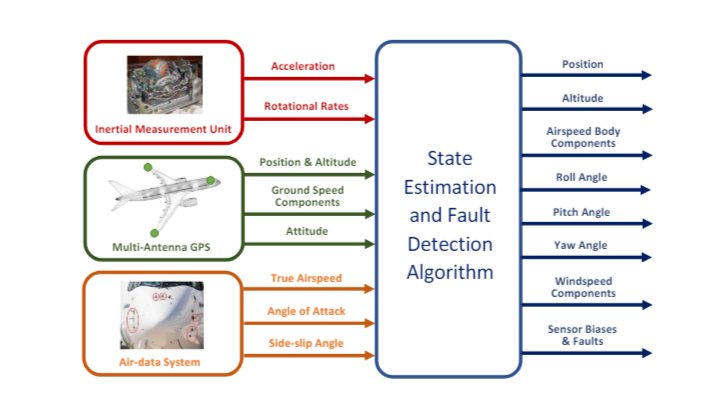
Integrated Navigation for Aircraft
Integrating GPS, IMU, & Air-Data Systems for Accurate Aircraft State Estimation & Fault Detection
Multisensor Systems Module Project
The University of Sheffield
📅 March 2024 – June 2024
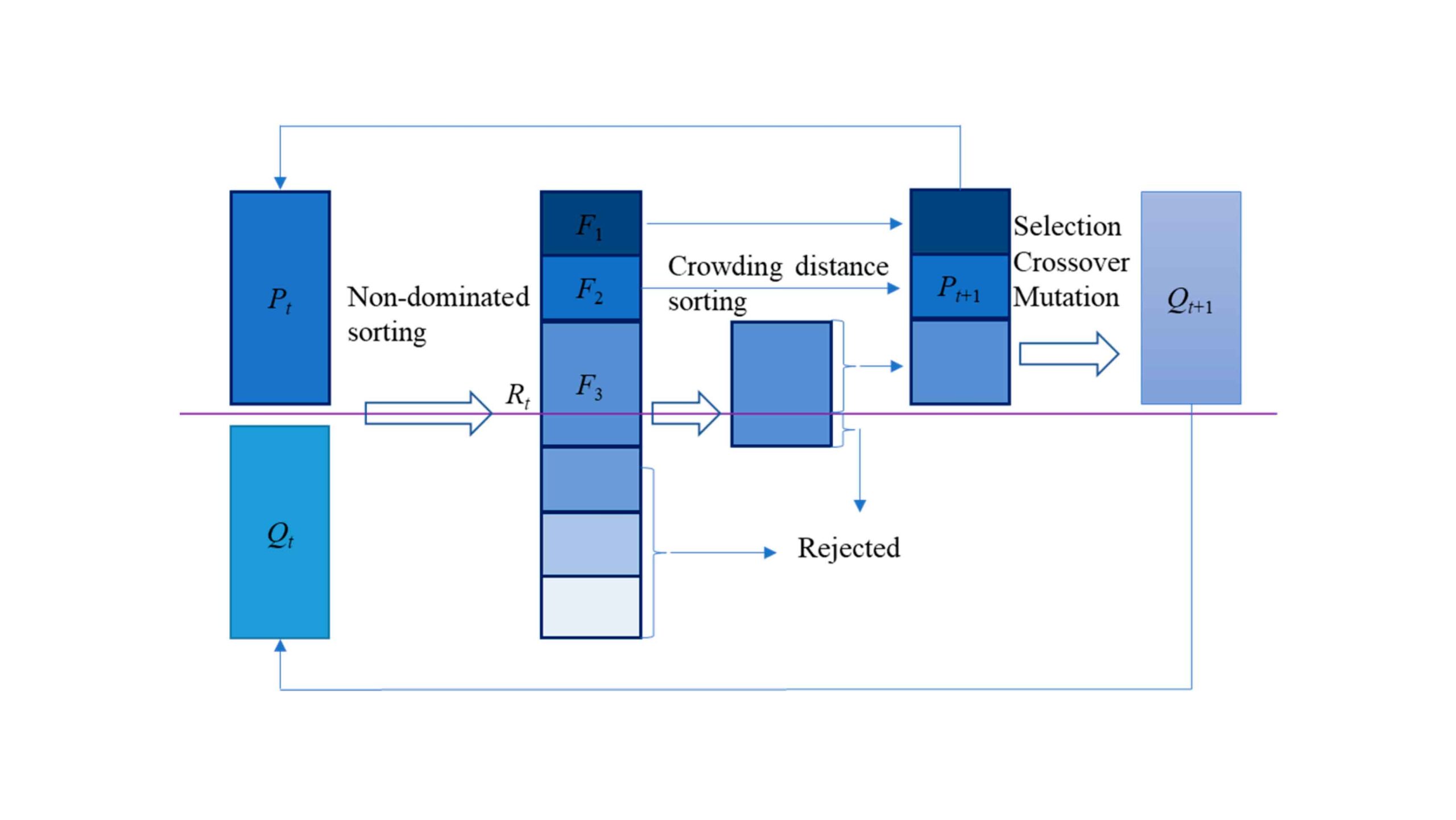
Optimising Electric Vehicle Conrol with NSGA-II
Optimising PI Controller Settings for Electric Vehicles Using NSGA-II Multi-Objective Genetic Algorithm
Decision Systems Module Project
The University of Sheffield
📅 May 2024 – June 2024
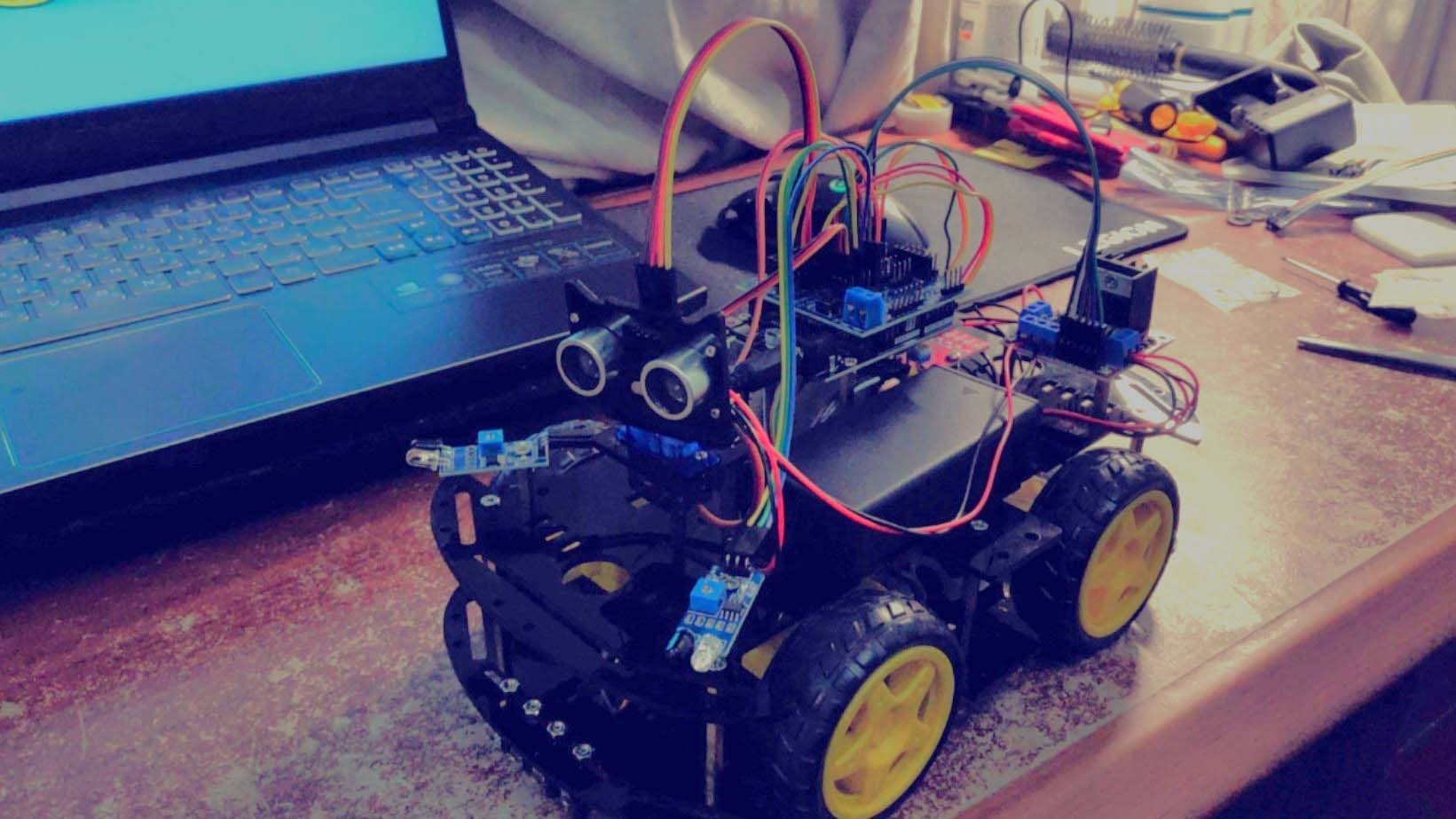
Vacuum Cleaning Autonomous Robot (VCAR)
Autonomous Robot with a Mini Vacuum Cleaner
Independent Personal Initiative
📅 June 2022 – Present
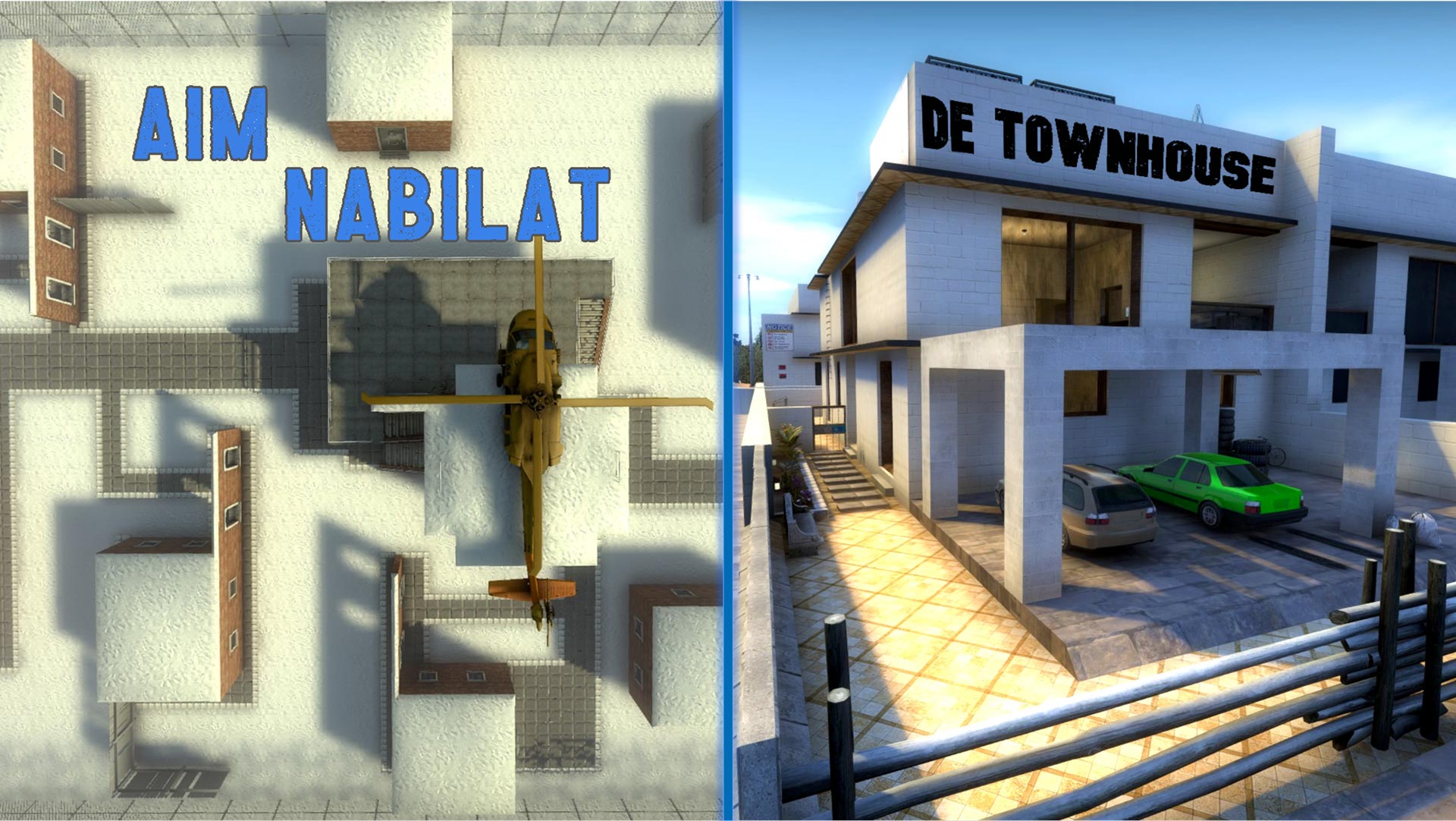
Game Map Development
5 Maps, 12000+ Users, 3 Community Awards
Independent Personal Initiative
📅 June 2018 – Present
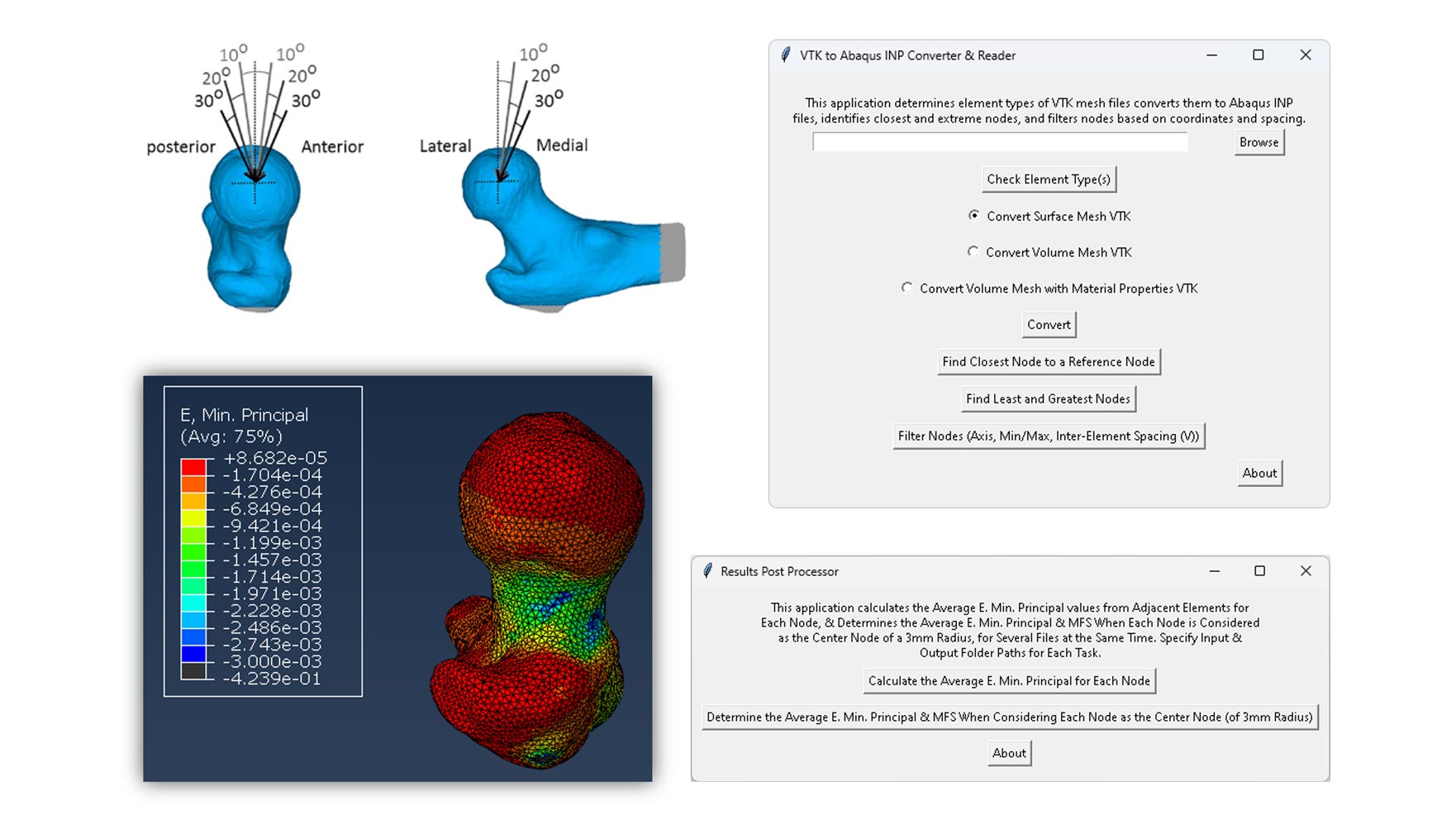
Verification of Bone Strength Pipeline in Abaqus
BEng Final Year Dissertation
The University of Sheffield
Pinaki Bhattacharya
📅 25 July – 19 September 2022 (7 Months)
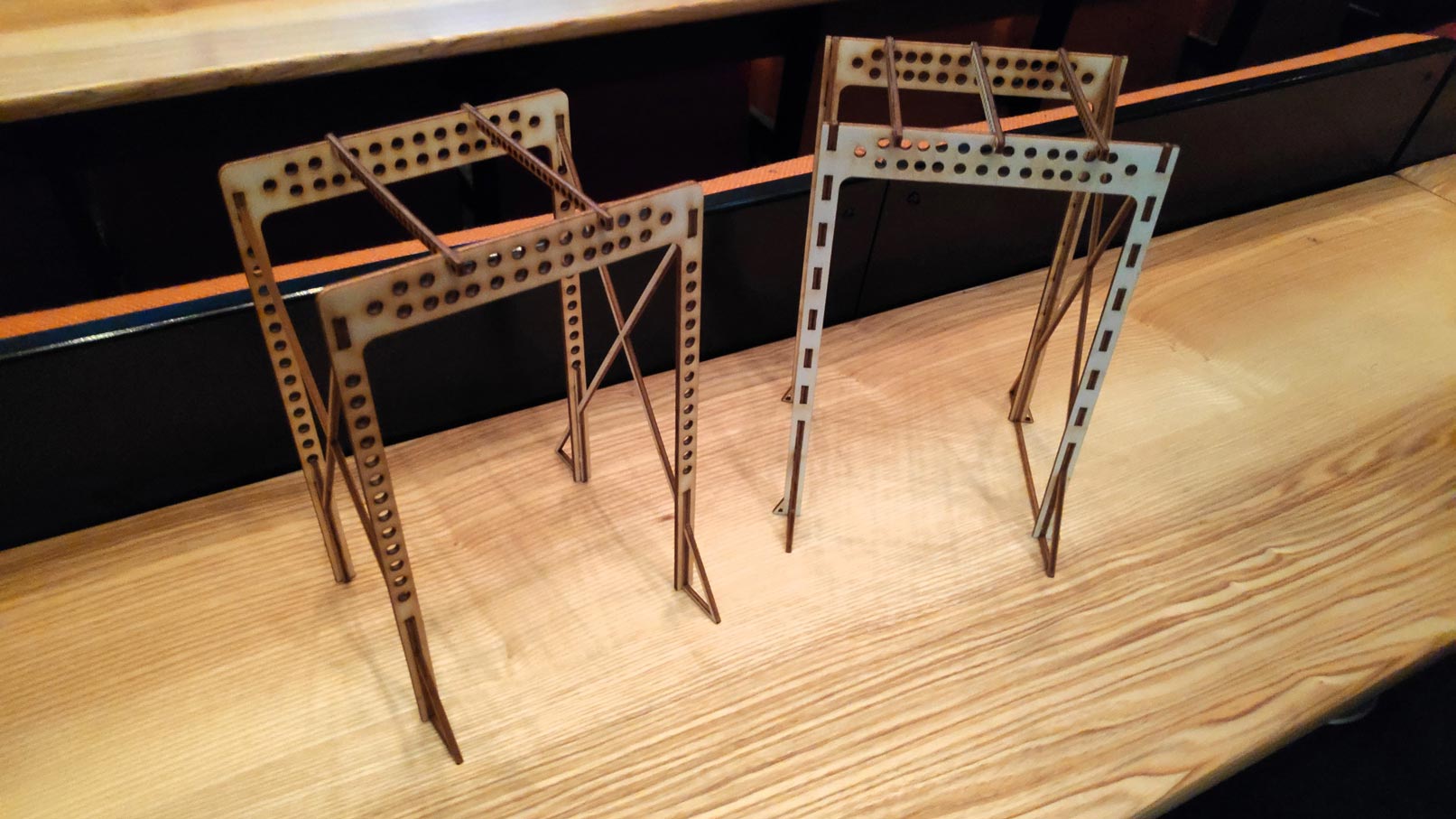
Make or Break 2022
Structure Capable of Supporting 18 kg Load
Design of Structures, Machines, and Systems Module
5 Member Mechanial Engineer Team
The University of Sheffield
📅 February 2022 – May 2022
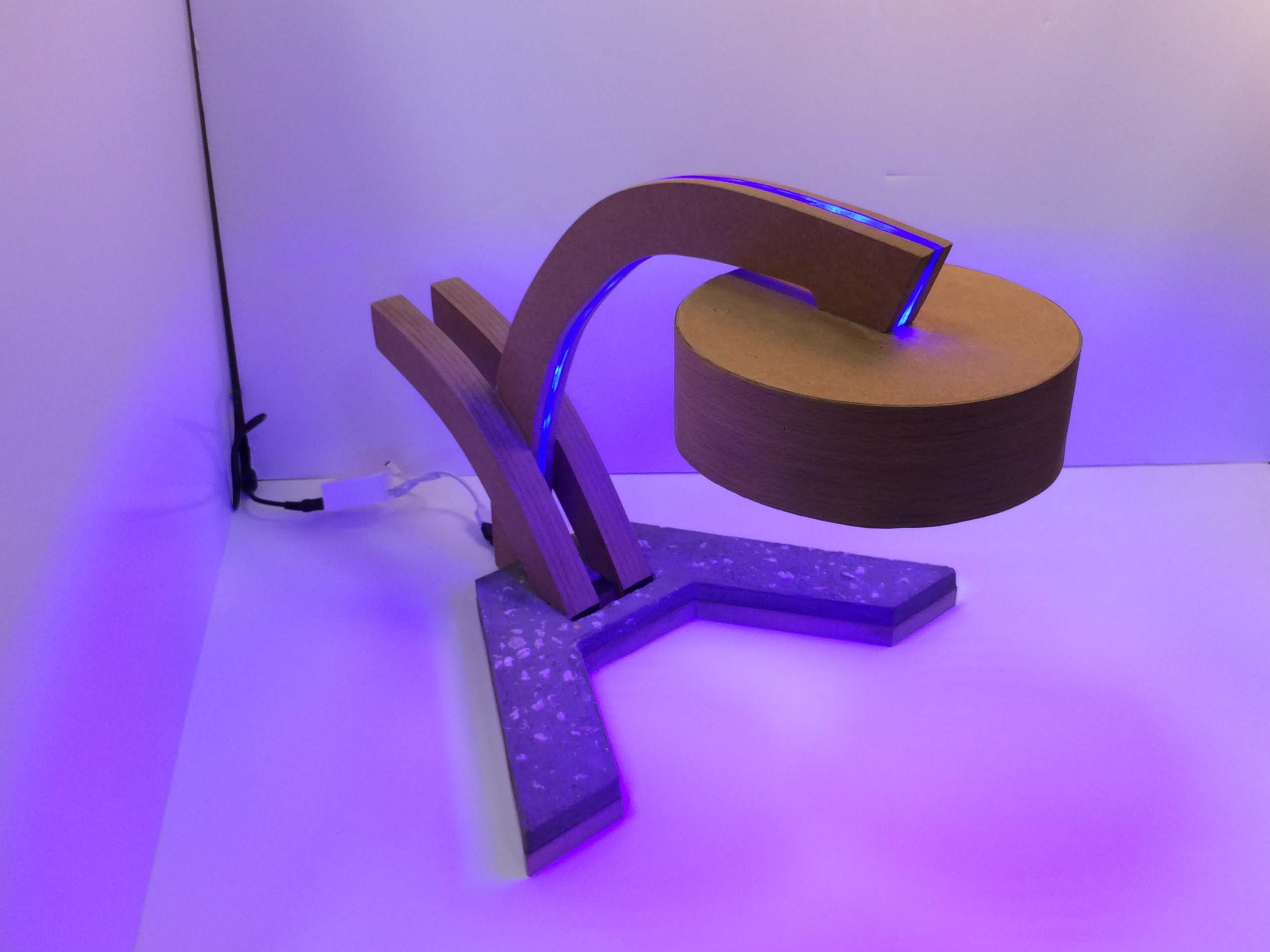
LED Wood, Concrete, & Acrylic Lamp
LED Lamp Manufactured using Wood, Concrete, and Acrylic
Independent Project
Design and Technology
Deira International School
📅 September 2017 – June 2018
Autonomous Vehicles
When and How Will Computers Take Over Humans in the Transportation Industry?
Independent Research Project
Extended Project Qualification
A Level – GEMS FirstPoint School
📅 September 2019 – June 2020
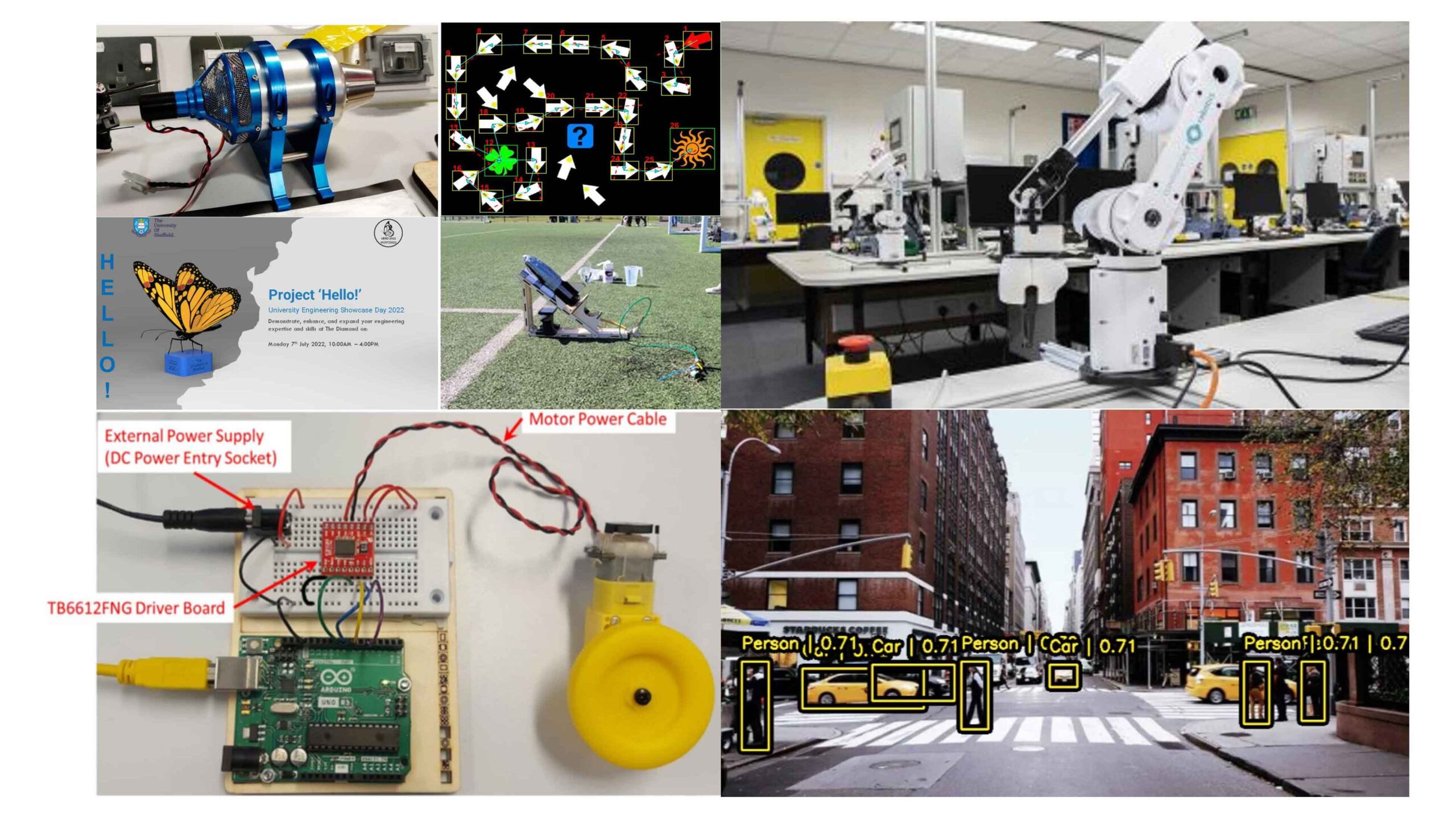
Other Relevant Work
Machine Vision & Deep Learning Labs
Arduino Integration & Mover6 Lab
Water Bottle Rocket 2021
TurboJet Wren80i Engine Disassembly
University Engineering Showcase Day 2022